About Me
I am currently an MSc student at the National University of Singapore (NUS), College of Design and Engineering. I conduct research in the Multi-Agent Robotic Motion (MARMot) Laboratory, advised by Asst. Prof. Guillaume Sartoretti.
Prior to joining NUS, I obtained my B.Eng in Aircraft Control and Information Engineering from the University of Electronic Science and Technology of China (UESTC), where I ranked 4/22 and was exempted from the National Postgraduate Entrance Examination due to academic excellence.
Currently, I am also delving into the field of Embodied AI. I firmly believe that this research direction has the potential to change the world.
My research interests lie at the intersection of Multi-Agent Systems, Reinforcement Learning, Robotic Control, Combinatorial Optimization, and Path Planning. Specifically, I focus on:
- Data-driven and learning-based control
- Distributed multi-agent systems
- Event-triggered control
- Multi-objective Optimization for MAS decision-making
Education
National University of Singapore (NUS)
MSc in Mechanical Engineering
GPA: 4.63/5.00 (Sem 1)
University of Electronic Science and Technology of China (UESTC)
B.Eng in Aircraft Control and Information Engineering
GPA: 3.78/4.00 (Rank 4/22)
News
- Aug 2025 Joined the MARMot Lab at NUS as a Research Student.
-
Jun 2025
Awarded First Prize in the National Graduation Design Competition for UAV Engineering.

-
May 2025
Awarded Second Prize in the National Undergraduate Thesis Competition (Aeronautics & Astronautics).


-
Oct 2024
Ranked in the Top 15.6% globally at the IEEE Xtreme 18.0 Programming Competition.

- Sep 2024 Obtained Recommendation for Postgraduate Studies (Waived from National Entrance Exam) due to academic excellence.
Selected Publications
CAMO: A Conditional Neural Solver for the Multi-objective Multiple Traveling Salesman Problem
Submitted to IEEE/RSJ International Conference on INTELLIGENT ROBOTS SYSTEMS (IROS), 2026.
Proposed a DRL-based framework CAMO for MOMTSP, achieving zero-shot generalization to various problem scales via conditional attention mechanisms and a decoupled collaborative decoder. Replaced the traditional hours-long inference time with seconds-level real-time reasoning while outperforming heuristic baselines (NSGA-III/MOEA/D) and DRL baselines (MO-PARCO).
Research Experience
Learning-Driven Optimization for MOMTSP and MOHCVRP
Research Assistant | NUS MARMot Lab | Jan 2026 - Present
Advisor: Asst. Prof. Guillaume Sartoretti
- Developed a Transformer-based Autoregressive Model to generate diverse Pareto-optimal solution sets for multi-objective routing.
- Implemented multi-agent RL with sparse rewards and transformer-based inter-agent communication.
- Evaluated against heuristic baselines (e.g., NSGA-III/MOEA/D) and DRL baselines (e.g., DRL-MOA, PMOCO, MO-PARCO), demonstrating strong hypervolume performance and rapid inference speed to prove the high efficiency of our method.
Multi-Objective Optimization for Multi-Robot Systems based on Deep Reinforcement Learning (CAMO)
Research Assistant | NUS MARMot Lab | Aug 2025 - Mar 2026
Advisor: Asst. Prof. Guillaume Sartoretti
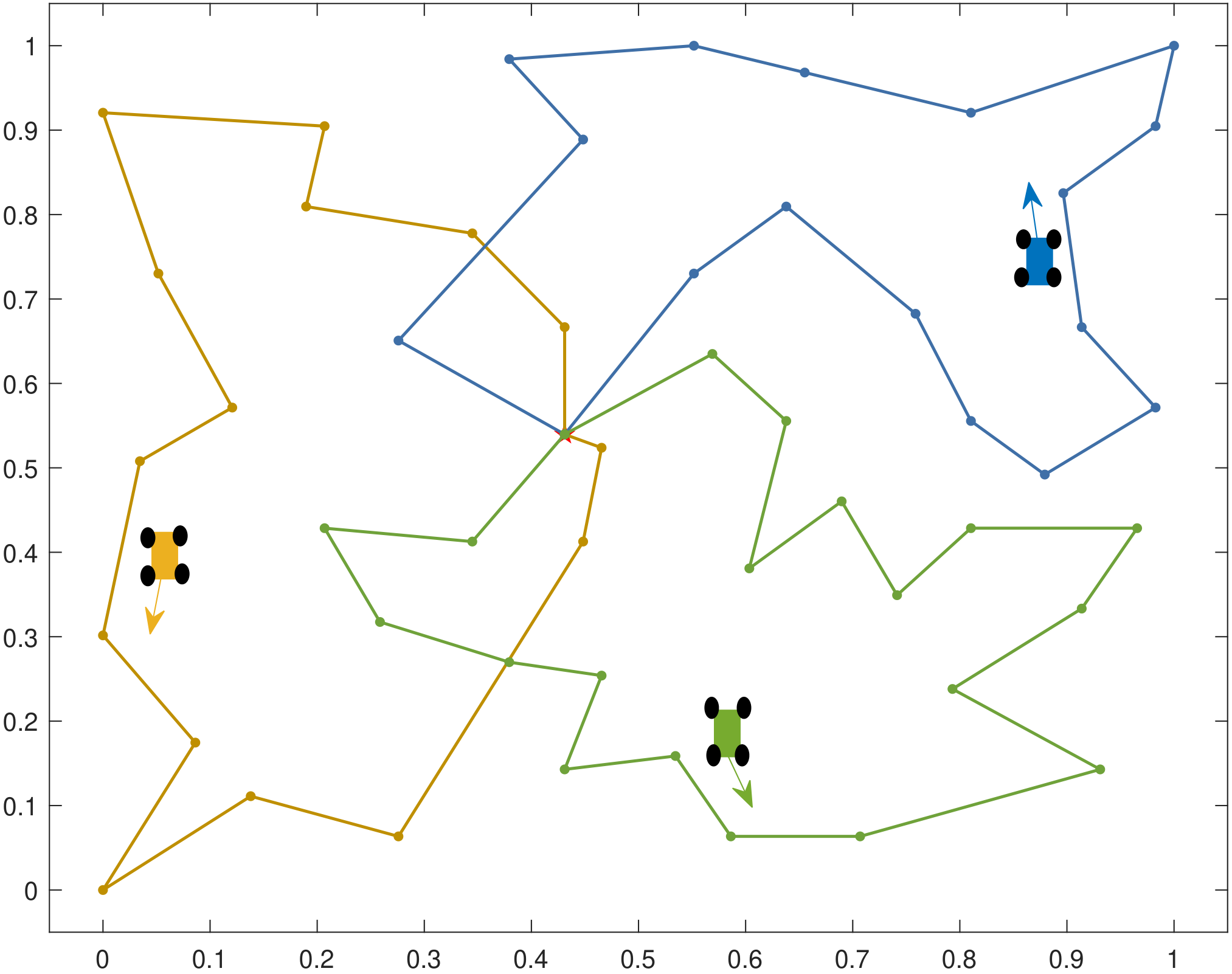
- Project Overview: Addressed the MOMTSP generalization challenge by proposing a DRL-based framework, CAMO, achieving Zero-shot Generalization to various problem scales via conditional attention mechanisms.
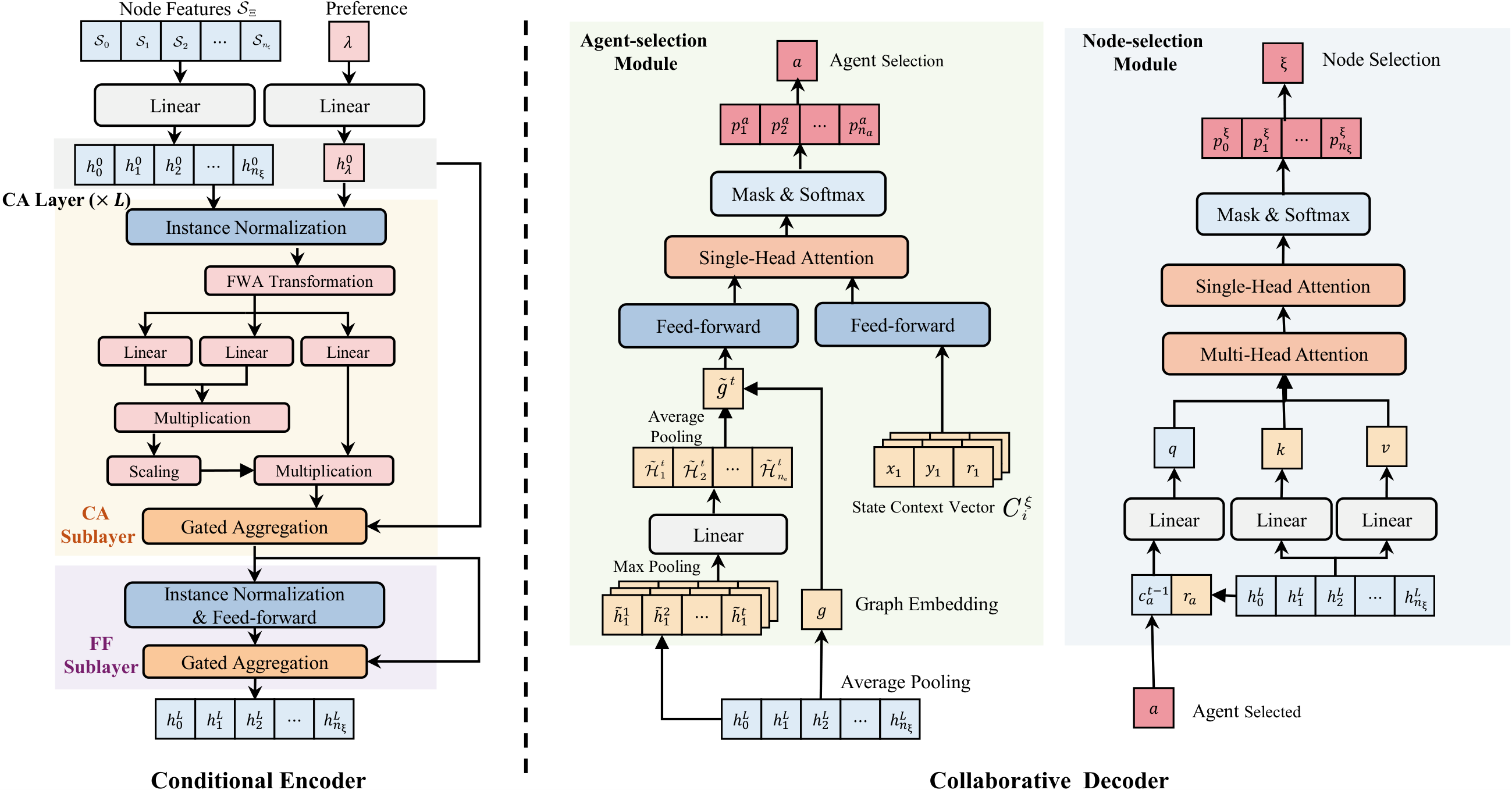
- Architecture Design: Proposed a Conditional Encoder to efficiently fuse multi-objective preferences and instance information, replacing residual connections with gated aggregation. Pioneered a decoupled Agent/Node-selection collaborative decoder to break input dimension constraints and bestow dual scalability.
- Performance Breakthrough: Improved the REINFORCE algorithm and dynamic sampling strategy. Outperformed heuristic baselines (NSGA-III/MOEA/D) and DRL baselines (MO-PARCO), reducing inference time from hours to seconds. Validated practical deployment viability on a ROS-based mobile robot platform.
Prescribed-Time Formation Tracking with Neural Event-Triggered Control
Research Assistant | UESTC | May 2024 - Jun 2025
Advisor: Asst. Prof. Zhiqiang Li
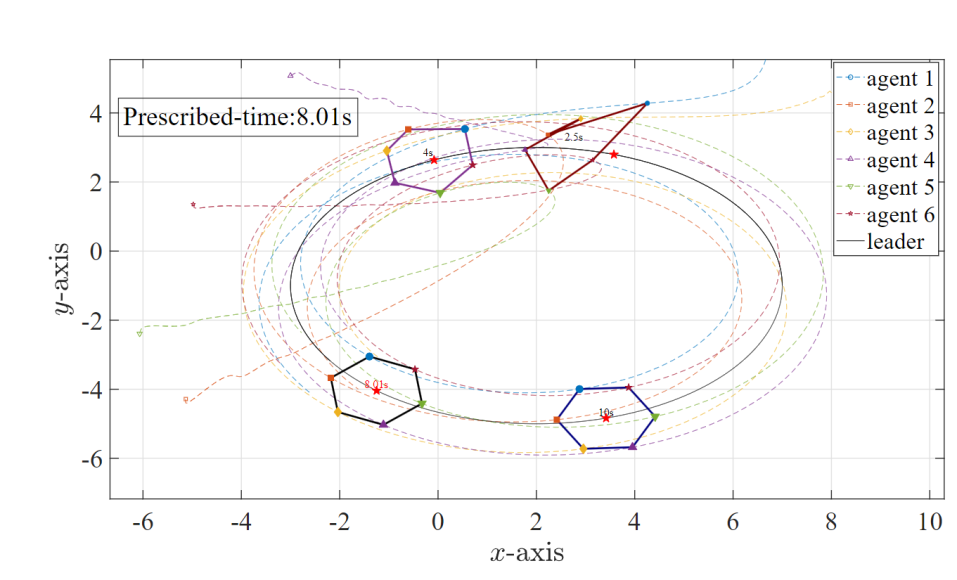
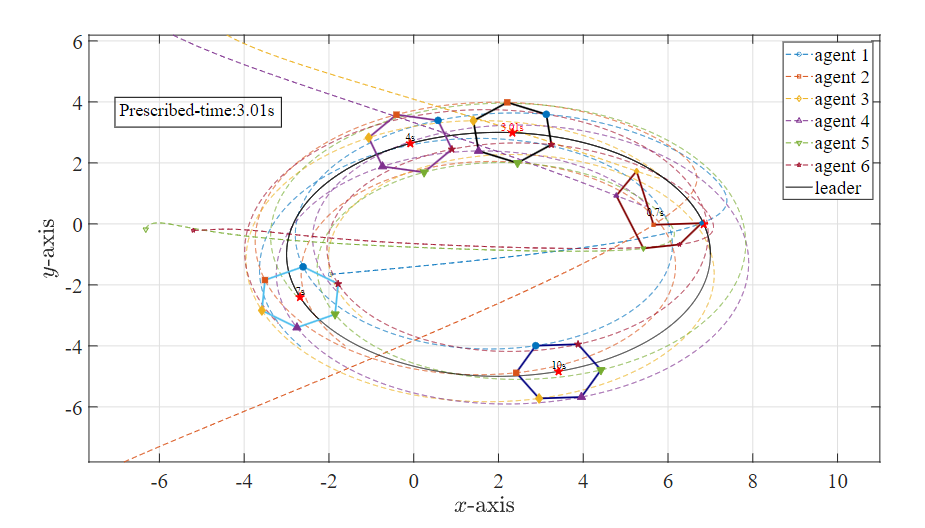
- Designed a prescribed-time formation tracking protocol for second-order multi-agent systems.
- Developed a neural adaptive event-triggered mechanism to reduce communication load.
- Validated robustness in MATLAB/Simulink under noise and distrubances.
Modular Classified Controlled Sounding Rocket
Team Member | UESTC
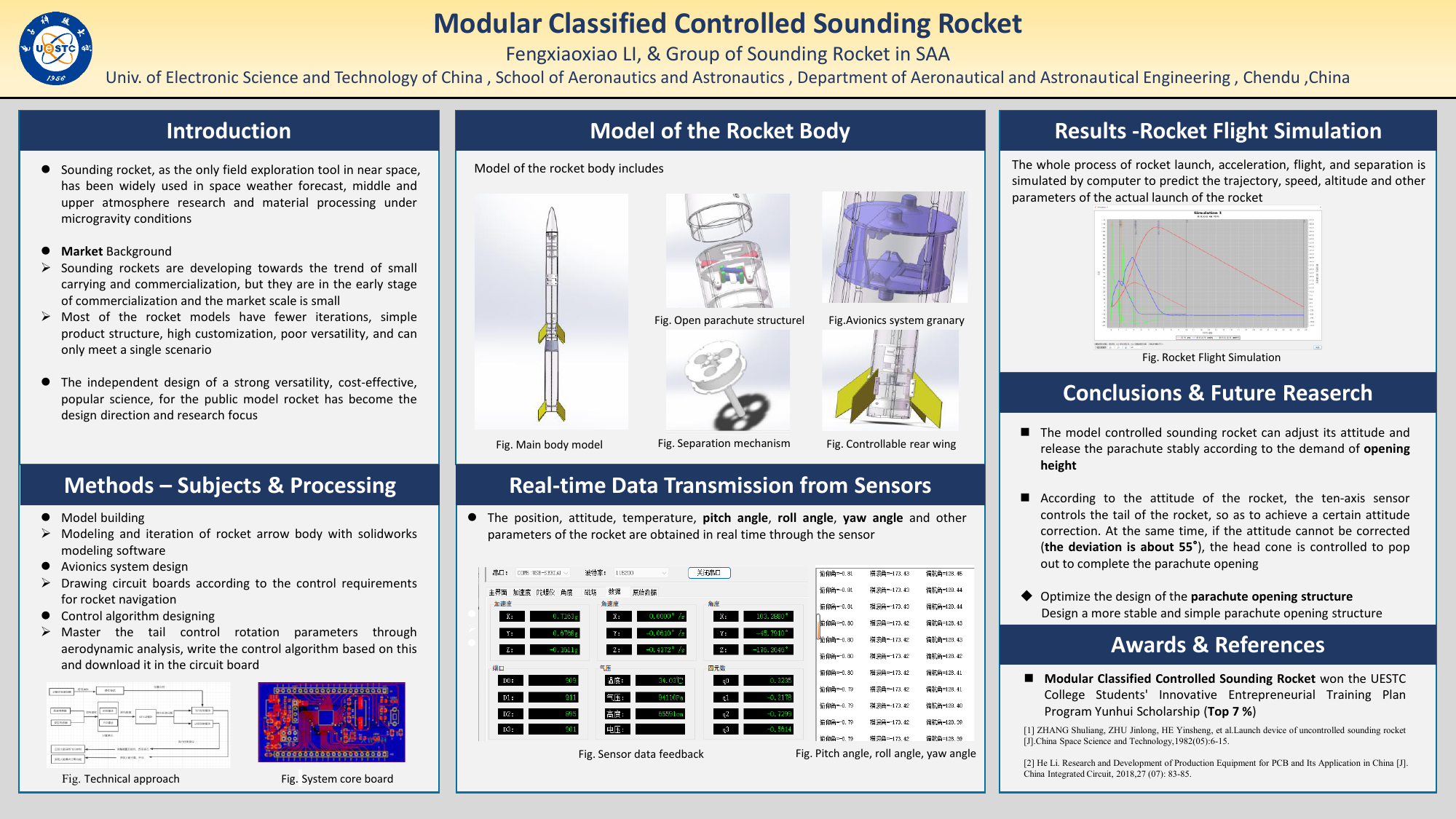
- Designed a versatile, cost-effective model rocket with independent avionics and control algorithms.
- Implemented stability control using a 10-axis sensor for real-time attitude correction and parachute release.
- Won the UESTC College Students' Innovative Entrepreneurial Training Plan Program Yunhui Scholarship (Top 7%).
Deep Learning-based Pneumonia Detection in Chest X-ray Images
Research Student | Nanyang Technological University | Jul 2024 - Sep 2024
Advisor: Dr. Teoh Teik Toe
- Selected 5,216 images from Kaggle datasets and performed undersampling to address class imbalance.
- Built a 4-layer CNN in TensorFlow, achieving 95.63% accuracy after 150 training epochs.
- Benchmarked performance against ResNet, Random Forest, and Logistic Regression models.
All-Terrain Foldable Multi-Legged Exploration Robot
Leader | UESTC | Mar 2023 - Jul 2023
Advisor: Prof. Zhenwei Wang
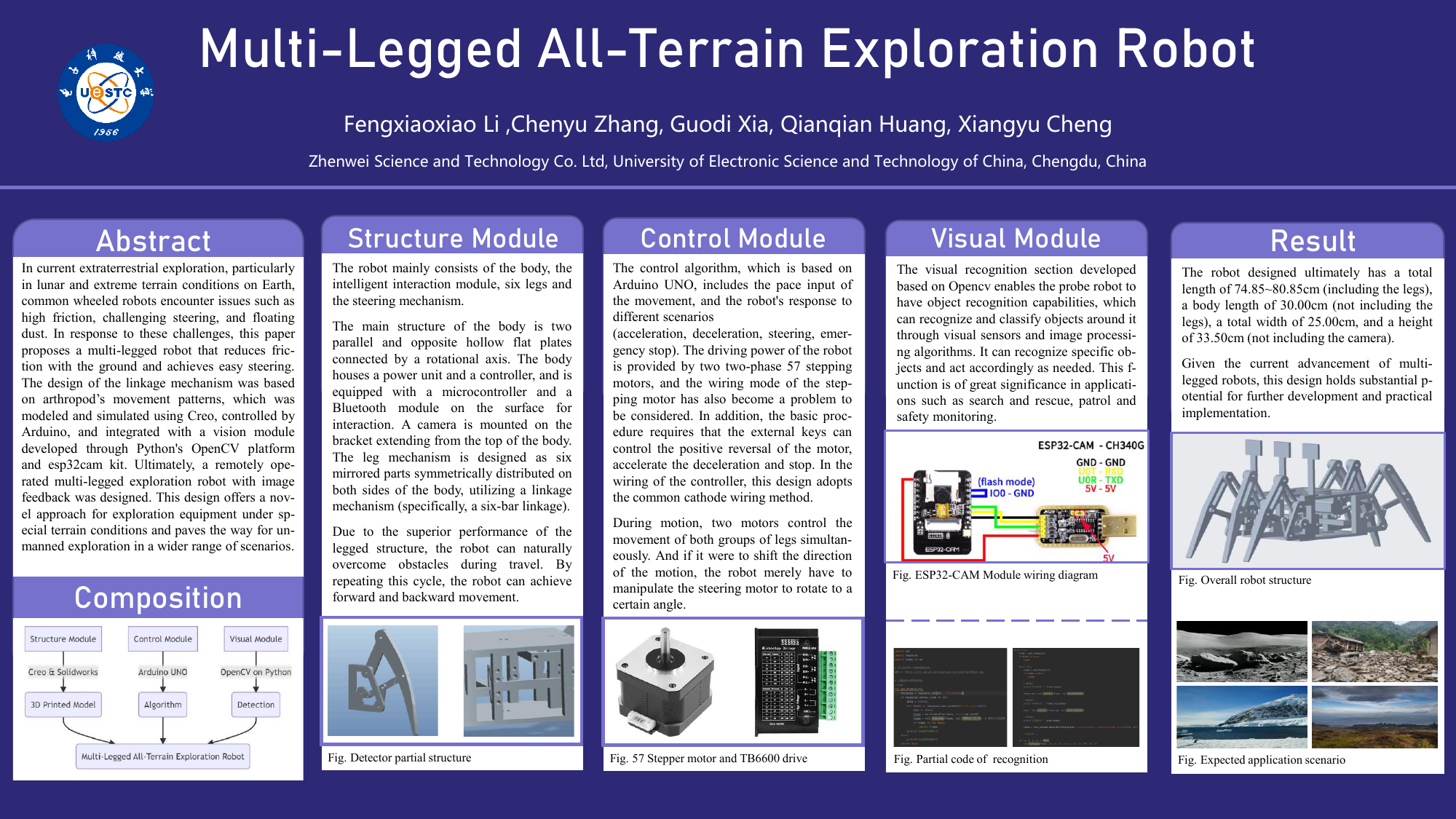
- Designed a foldable hexapod robot and implemented a stable triangular gait for uneven terrain.
- Built embedded locomotion control (Arduino + TB6600) for stepper motors.
- Deployed CNN-based obstacle recognition on ESP32-CAM (96.8% accuracy).
Honors & Awards
- Graduate Awards: Innovation/Endeavor/Contribution (Selected 1/23) (2025)
- First Prize, National Graduation Design Competition for UAV Engineering (2025)
- Second Prize, National Undergraduate Thesis Competition (Aeronautics & Astronautics) (2025)
- UESTC College Students' Innovative Entrepreneurial Training Plan Program Yunhui Scholarship (Top 7%) (2024)
- Distinction Winner, NTU AI Lab Summer Research Program (Top 2%) (2024)
- Top 15.6% Globally, IEEE Xtreme 18.0 Programming Competition (2024)
- UESTC Outstanding Student Scholarship (2022-2024)